
Az odométerről általánosságban
Az odométer szerepe és a konfidencia-intervallum
Az odométer rendszertechnikai adatai
Az odométerről általánosságban
Az odométer egység kerékszenzorból és opcionálisan Doppler-radarból áll. Használatukkal biztosítható a megfelelő minőségű sebesség- és távolságmérés. Opcióként felmerült, hogy egyes esetekben a futó mozdonyok meglévő érzékelőit is fel lehetne használni (pl. tachométerek).
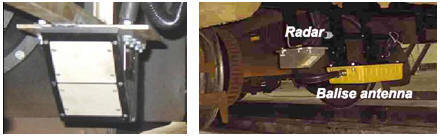
A kerékszenzor a mozdony tengelyén helyezkedik el és a forgó kerék működteti. Ezzel szemben a radart legtöbbször a vonat elején, az ütköző alatt, vagy a forgózsámolyok között szokták elhelyezni.
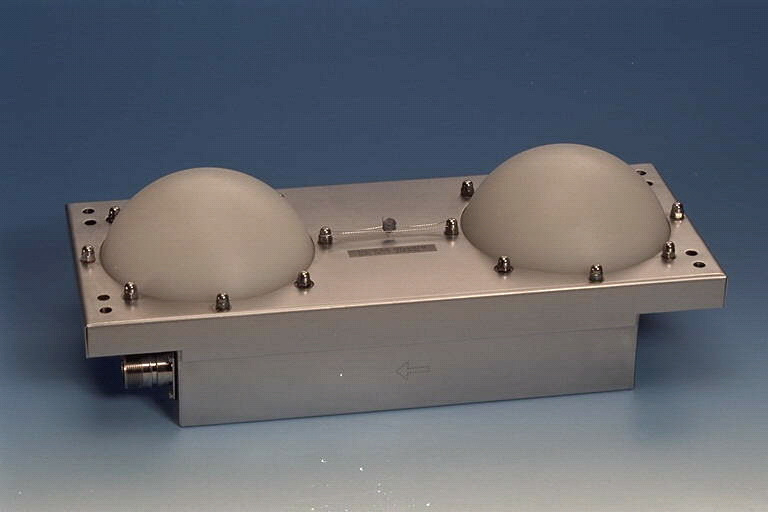
Odométer (Radar balról, kerékszenzor jobbról) – Alstom
Az odométer folyamatos összeköttetésben van az EVC-vel (Kernel). Bár a következőkben tárgyaltak fizikailag nem mind az odométerben valósulnak meg, ám ebben most nem teszünk különbséget. Célunk inkább az odométerhez kapcsolódó funkciók bemutatása.
Az odométer modul feladata az aktuális LRBG (meghatározó balízcsoport, mint közös vonatkoztatási pont), valamint az ettől való távolság meghatározása, és ennek függvényében az aktuális konfidencia intervallum számítása. Érzékeli – csak élesztett mozdony esetén – az aktuális sebességet, illetve az állóhelyzetet, továbbá a mozgás irányát. Az ezekhez szükséges inputokat és a keletkező outputokat az alábbi ábra foglalja össze:
Odométer makrofunkciók
Az odométer szerepe és a konfidencia-intervallum
A fedélzeti berendezés a biztonság érdekében valamennyi a pályától érkező helyfüggő információt a vonat helyzetére vonatkozó megbízhatósági intervallum függvényében vesz figyelembe. Erre az ún. konfidencia intervallumra az odométer mérési pontatlansága miatt van szükség, nagyságát az LRBG-től való távolság határozza meg. Minél távolabb kerül a vonat az utolsó (pontosan ismert) referenciaponttól, annál nagyobb a pontos helyzetére vonatkozó konfidencia intervallum, azaz annál nagyobb a vonat pontos pozíciójának bizonytalansága. Amint a vonat eléri a következő láncolt balízcsoportot, a láncolási pontosságot figyelembe véve frissíti helyzetmeghatározó információit
A vonat elejének pozíciójára a fentiek figyelembe vételével a következőképpen hivatkozhatunk:
a vonat elejének becsült pozíciója,
a vonat elejének maximális biztonsági pozíciója,
a vonat elejének minimális biztonsági pozíciója.
A maximális biztonsági pozíció abban különbözik a becsült pozíciótól, hogy utóbbihoz hozzászámítjuk még az aktuális konfidencia intervallumnak megfelelő alábecslési hibát. Hasonlóan a minimális biztonsági pozíció esetén a becsült pozícióból levonjuk az aktuális konfidencia intervallumnak megfelelő túlbecslési hibát.
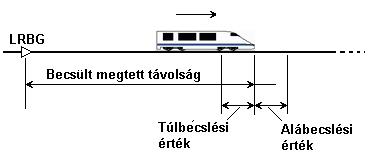
Vonat elejére vonatkozó konfidencia intervallum
A fentieknek megfelelően a vonat végét illetően is mindig meghatározható a maximális biztonsági vonatvég és a minimális biztonsági vonatvég. Fontos azonban megjegyezni, hogy utóbbi biztonsága csak a vonategység ép információval kiegészülve garantálható (a vonat nem szakadt szét)! A biztonsági helyzetadatok közül az adott információtól függően a fedélzeti berendezés mindig a legkorlátozóbbat veszi figyelembe számításaihoz.
Egy a láncolási információban szereplő balízhoz közeledve a vonat folyamatosan figyeli saját becsült pozícióját, és csak akkortól fogadja el a balízt, amikor a vonat maximális biztonsági eleje elérte a balíz első lehetséges pozícióját; és csak addig fogadja el a balízt, ameddig a vonat minimum biztonsági eleje meg nem haladja a balíz utolsó lehetséges pozícióját. Másképpen fogalmazva addig, amíg a vonat elejének konfidencia-intervallumában kerül meghaladásra a balíz. Ha ezen a várakozási ablakon kívül (hamarabb vagy később) érzékeli az antenna, akkor a balíz visszautasításra kerül. A számításokkor a fedélzeti berendezés figyelembe veszi a vonat tényleges eleje és a balízantenna felszerelési helye közötti távolságot is.
Az odométer a bekapcsolási önteszten túl rendszeresen, illetve az EVC (Kernel) külön kérésére is önteszteket végez. Bekapcsoláskor, illetve amikor az szükséges az EVC elküldi a konfigurációs paramétereket – a ciklusidő és a maximális gyorsulás értékét – az odométernek. Az odométer visszaigazolja a kernelnek karakterisztikáját, állapotát és jelzi, hogy a konfigurálás sikeresen végrehajtódott-e. Ha igen, akkor ezután a meghatározott ciklusidő függvényében az odométer periodikusan küldi mérési eredményeit a kernelnek. Amikor egy a kalibráláshoz, illetve referenciahelyként felhasználható balíz kerül meghaladásra, akkor annak azonosítóját az EVC elküldi az odométernek, azzal kiegészítve, hogy a távolságmérés hibaszáma nullázható-e vagy sem. Az odométer visszaigazolja a megkapott információkat. Abban az esetben, ha egy balíz információit nem sikerül kiértékelni, vagy menetirányváltás miatt nem kerül meghaladásra, akkor a kernel utasítja az odométert a balíz azonosítójának elküldésével, hogy az adott balízra vonatkozó információkat hagyja figyelmen kívül. Ezt az odométer szintén visszaigazolja.
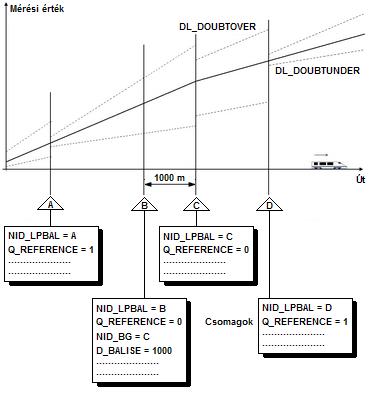
A fentiekre látható konkrét példa a lenti ábrán. A diagram folyamatos fekete vonala az odométer által mért értéket mutatja, míg az alatta, illetve felette futó szaggatott vonalak jelölik a számított konfidencia-intervallum alsó (DL_DOUBTUNDER változó), illetve felső (DL_DOUBTOVER változó) határát. Az A balíz meghaladása után a kerneltől kapott csomag szerint a balíz referenciahelyként felhasználható (Q_REFERENCE=1), így a konfidencia-intervallum az odométer saját pontosságát is figyelembe véve „nullázódik”. A referenciabalíztól távolodva a konfidencia-intervallum ismét nőni kezd. A B balíz az ott kapott Q_REFERENCE változó 0 értéke szerint nem használható fel a távolságszámítás kalibrálásához, így az intervallum C felé haladva monoton növekszik tovább. Figyelembe tudja viszont venni a mérőberendezés, hogy ismert a B és a C balíz közötti pontos távolság. Emiatt a C balíz meghaladásakor a konfidencia-intervallum szélsőértékei – ha nem is nullára, de – a B balíznál felvett értékre esnek vissza. Ahogy az az ábrán látható, a D balíz ismét egy referenciapontként felhasználható láncolt „elektronikus kilométerkő”.
Az odométer kalibrálásának folyamata
A konfidencia-intervallum meghatározása tehát komplex feladat, ahol figyelembe kell venni magának a referenciapont érzékelésének a pontosságát, a környezeti feltételeket, a szenzorok állapotát, a jármű paramétereit és egyéb információkat.
Az odométer rendszertechnikai adatai
A kerékszenzor ideális esetben a mozdony egy szabad tengelyén helyezkedik el, és a forgó kerék működteti. A kerékszenzor két független csatornából áll. A mozdony mozgásakor a kerékszenzor két, fázisban eltolt négyszögjelet állít elő. A két csatorna frekvenciája állandó és arányos a mozdony pillanatnyi sebességével. A két jel fáziseltolódását a vonat haladási iránya határozza meg. A frekvencia mérésével a kerék kerületének ismeretében az EVC képes kiszámítani a pillanatnyi sebességet és így azt a DMI kijelzőn megjeleníteni. Az EVC ezen kívül a fékezési műveletek alkalmával a kerékszenzor jeleit visszacsatoló jelként használja.

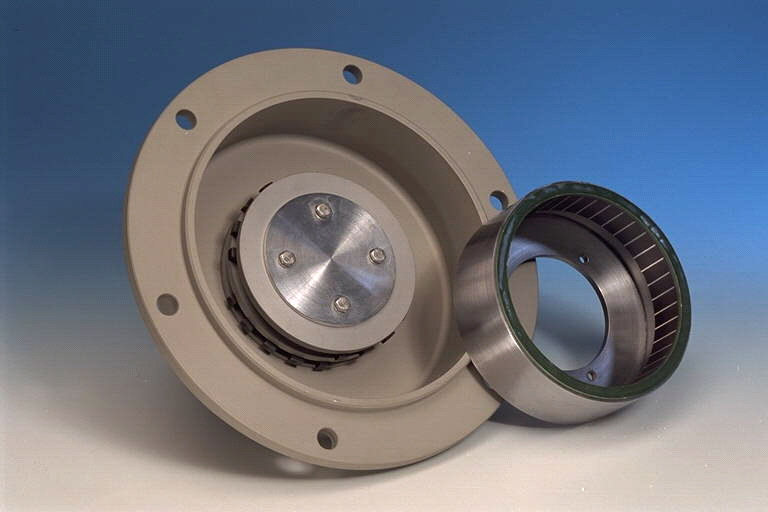
Kerékérzékelők
A kerékszenzor két csatornájának fáziseltolódása
Ha a kerékérzékelő a jármű hajtott tengelyére kerül, akkor fokozottan fennáll a kipörgés és megcsúszás veszélye. Kiegészítő elemként egy radarberendezés segítheti a pontosabb sebesség- és távolságmérést. Működésének alapja a doppler-elv, ami nem más, mint az a hatás, amelynek értelmében, ha a megfigyelő és a sugárforrás egymáshoz képesti helyzete megváltozik, akkor a sugárzás hullámhossza is megváltozik. Ha a sugárforrás távolodik a megfigyelőtől, akkor a megfigyelő által detektált frekvencia kisebb lesz; ha pedig a sugárforrás közeledik a megfigyelőhöz, akkor a detektált frekvencia nagyobb lesz, mint nyugvó forrás esetén lenne.
A radar
A radar szó a RAdio Detection And Ranging (rádiófelderítés és távolságmérés) angol kifejezés kezdőbetűinek összevonásából ered, és ilyen értelemben különböző céltárgyak elektromágneses hullámok segítségével történő felderítésére szolgál. Hertz először 1887-ben állította elő az elektromágneses hullámokat, Nikola Tesla pedig 1900-ban kísérleteket folytatott mozgó céltárgyak helyzetének meghatározására, a céltárgyról visszavert elektromágneses hullámok (rádióhullámok) segítségével. 1904-ben Angliában jelentették be az első szabadalmat egy Telemobiloscop nevű műszerrel, amellyel már meg lehetett határozni a mozgó és álló célok helyzetét, ill. távolságát.Sebesség mérésére az ún. Doppler-eltolódáson alapuló radarokat először az 1930-as évek első felében alkalmazták. A Doppler elv lényege, hogy a készülékből kibocsátott, majd visszaverődött radarhullámok (amelyeket a készülék felfog) közötti frekvencia-eltolódásból egy számítógép ki tudja számítani a jármű pillanatnyi sebességét. A frekvencia-eltolódás a hullámforrás és a visszaverődést előidéző (reflektáló) objektum egymáshoz képesti mozgása miatt keletkezik.A II. világháború során a radarberendezéseket még főként a repülőgépek felderítésére és távolságuk meghatározására használták. Természetesen a technika fejlődésével ezek a berendezések is rohamtempóban korszerűsödtek, így a hatvanas években 'divatos', még lábakon billegő, lavór méretű radarokat hamar felváltották az észrevehetetlenül kis műszerek, amelyek mára a sebességmérés egyik leggyakoribb eszközévé váltak.A működési elvet illetően két fő típust különböztetünk meg: az impulzus és a folyamatos (CW) üzemű radart. A CW-radar folytonos – állandó frekvenciájú és amplitúdójú – szinusz jeleket sugároz ki a céltárgy irányába. Ebben az esetben a Doppler-eltolódás – visszavert jel frekvenciájának megváltozása – a sebesség nagy pontosságú mérését teszi lehetővé. Az alkalmazott mikrohullámot azért választják, mivel egyenes vonalban terjed, a légköri hatások (pára, eső) viszonylag kevéssé csillapítják és a hullámhossztól függően viszonylag kis méretű antennákkal jól fókuszálható. |
A radarmérő másodpercenként több mérést végez a Doppler-elv alapján, és csak akkor továbbítja az adatot, ha a szomszédos mérések nagyjából azonos értékeket mutatnak, vagyis ellenőrizhető az egyszeri mérés. (Az egyes gépkocsikba szerelt radarzavaró éppen ezt használja ki úgy, hogy antennáján keresztül nagyobb erősségű, ám hamis jeleket küld vissza így a mérések eredménye felváltva egy kisebb, illetve egy nagyobb értéket jeleznek, amelyek távolról sem tekinthetők azonos értékeknek, aminek következményeképpen a hatósági sebességmérő nem jelez semmit.)
Lap teteje
ETCS
Az ETCS
Az ETCS története
ETCS specifikációk
Rendszerelemek
Pályamenti rendszerelemek
- Balíz
- LEU egység
- Hurok
- Rádióhálózat
- RBC központ
- RIU egység
Fedélzeti rendszerelemek
- EVC
- BTM/LTM modul
- DMI
- JRU adatrögzítő
- Odométer
- STM modul
- Rádió
- TIU egység
- Vonatintegritás
ETCS szintek
1-es szint
2-es szint
3-as szint
STM szint
0-s szint
ETCS üzemmódok
Küldetés ETCS-ben
Az ETCS nyelv
Változók
Csomagok
Táviratok
Üzenetek
ETCS könyv
Az ETCS jelene
Az ETCS jövője
Vissza a főoldalra