
Rendszeradatok
Küldetés kezdete
Közlekedés ETCS-ben
Küldetés vége
Mozdonyvezető által kezdeményezett tolatás
Rendszeradatok
Számos helyen, így például a készenléti üzemmódnál is szó volt azokról a vonatadatokról, amelyeket a mozdonyvezetőnek meg kell adni, vagy érvényesíteni kell az elindulás előtt az adatbeviteli eljárás keretében. Az ETCS-ben való közlekedés áttekintése előtt ismerkedjünk meg az ETCS által kezelt adatokkal, adatcsoportokkal, úgymint:
fix adatok,
nemzeti és default értékek,
vonatadatok,
egyéb adatok,
dátum/időadatok.
1. Fix adatok
A vonat felügyelete során az alábbi táblázatban felsorolt fix értékek használatosak ún. rendszerparaméterként, amelyek rendszerfüggők, éppen ezért csak egy esetleges verzióváltáskor változtathatók meg.
|
Fix értékű adat |
Érték |
Név |
|
Biztonsági kapcsolat létesítésére tett próbálkozások száma |
3-szor |
|
|
Rádióüzenetek ismétlésének száma |
3-szor |
|
|
Engedélyezett és vészfék-beavatkozási sebesség közötti minimális sebességkülönbség |
5 km/h |
DV_EBImin |
|
Engedélyezett és vészfék-beavatkozási sebesség közötti maximális sebességkülönbség |
15 km/h |
DV_EBImax |
|
Engedélyezett és vészfék-beavatkozási sebesség kapcsolatát leíró konstans |
0.1 |
C_EBI |
|
Maximális távolság a földrajzi távolság számításához |
10000 m |
DGEO |
|
Menetengedély-kérés ciklusideje (default érték) |
60 sec |
T_CYCRQSTD |
|
Üzemmód-átmenet nyugtázási ideje |
5 sec |
T_AMT |
|
Tapadási érték (1) – nem csúszós sínpálya |
100 % |
M_ADHESION |
|
Tapadási érték (2) – csúszós sínpálya |
70 % |
M_ADHESION |
Fix adatok
2. Nemzeti/default értékek
A felügyeletnek az aktuális infrastruktúrához kapcsolódó adatai a következő táblázatban láthatóak. A táblázat cellái a 2006-ban érvényes adatokat tartalmazzák, amelyek a szélesebb körű alkalmazás során változhatnak, tekintve, hogy számos ország a telepítés tesztelési, pilot szakaszában van. Mindemellett érdekes összehasonlításra ad lehetőséget az ETCS-nek az egyes nemzeti szabályrendszerekhez történő illesztése.
A nemzeti értékek default és országadatai
* Az ALTRACS MÁV projekt 1-es fázis keretében a rendszer nem működteti az üzemi féket. Emiatt, ha a rendszer az üzemi fék alkalmazását követeli meg, csak a vonóerő kikapcsolása történik meg, és megjelenik az üzemi fék jelzés a DMI-on. Ebben az esetben a mozdonyvezetőnek a meghatározott késleltetési időn belül manuálisan kell működésbe hoznia az üzemi féket, a rendszer vészfékezésének elkerülése érdekében.
A nemzeti értékek rendelkezésre állása esetén a fedélzeti berendezés ezeket veszi figyelembe, egyébként a default, alapértelmezett értékek kerülnek alkalmazásra.
3. Vonatadatok
A vonatadatok jellemzője, hogy a vonatszám kivételével a pályamenti berendezések nem adhatják meg és nem módosíthatják azokat. Egy ERTMS/ETCS fedélzeti berendezésű (aktív, vezérlő) mozdonynak a következő vonatadatokkal kell rendelkeznie:
vonat kategória,
vonathossz,
lassulási adat (vontatásra/fékre vonatkozóan),
vonat maximálisan engedélyezett sebessége (a vonat valamennyi járművére tekintettel),
rakszelvény,
tengelyterhelés,
vonat számára alkalmas feszültségnem(ek),
légmentes zárás képessége,
a fedélzeten elérhető STM típusok,
elérhető STM-ek egyéb adatai,
vonatszám.
A vonatszámot megadhatja a mozdonyvezető, érkezhet egy külső forrásból (interfészen keresztül), vagy az RBC-től. Nem vezérelt, tandem mozdony számára is megadható a vonatszám, de a többi adat bevitele nem szükséges.
2/3-as körzetben vonatadat megerősítésénél, illetve a körzetbe érkezéskor a fedélzeti berendezés az alábbi vonatadatokat küldi el az RBC-nek:
vonatkategória,
vonathossz,
vonat számára maximálisan engedélyezett sebesség,
rakszelvény,
tengelyterhelés,
vonat számára alkalmas feszültségnem(ek),
légmentes zárás képessége,
a fedélzeten elérhető STM típusok,
vonatszám.
Valamennyi vonatadat csak a vonat álló helyzetében adható meg vagy módosítható, amely alól ismételten csak a vonatszám kivétel.
4. Egyéb adatok
Mozdonyvezető azonosító:
Ez azonosítja az aktív vezetőálláson felelős személyt. Az azonosító a kezelések hatósági rögzítéséhez fontos. A specifikáció lehetőséget biztosít arra, hogy a vezetőazonosító menet közben is megváltoztatható legyen, illetve arra, hogy egy nem vezérelt, de mozdonyvezetővel rendelkező mozdonyon is megadható legyen.
ERTMS/ETCS szint:
Elinduláskor (küldetés kezdetekor) lehetőséget kell adni a mozdonyvezetőnek, hogy megadhassa az aktuális ETCS szintet. Normál üzemi körülmények között az elindulás után már nem kell az ETCS szintet a vezetőnek kiválasztani, valamennyi átmenet automatikusan történik.
RBC azonosító, telefonszám:
Az RBC-azonosító és -telefonszám az RBC-vel való rádiós kapcsolattartáshoz szükséges. Ha küldetés kezdetén a tárolt RBC-azonosító és -telefonszám nem áll rendelkezésre, akkor a mozdonyvezető manuálisan megadhatja azokat. Ezután ezen adatok módosulása minden esetben automatikusan történik.
ETCS azonosító:
Valamennyi ERTMS/ETCS berendezéshez a saját csoportján belül tartozik egy egyedi ETCS azonosító. Ennek megfelelően valamennyi RBC-nek, fedélzeti berendezésnek, balízcsoportnak, huroknak és rádiós infill egységnek egyedi azonosítója van.
Adhéziós faktor:
Az adhéziós vagy másképpen tapadási tényező a fékezési modell beállításához szükséges. Különlegessége, hogy a pálya állapotában bekövetkező változásokhoz való gyors alkalmazkodás érdekében – a nemzeti érték függvényében – menet közben is módosítható. A tényező értékét a pályaoldal, illetve a nemzeti értékek függvényében a mozdonyvezető is megváltoztathatja. Előbbi esetben a fedélzeti berendezés természetesen tájékoztatja a mozdonyvezetőt. A dinamikus sebességfelügyelet a két forrás értéke közül mindig a korlátozóbb tapadási tényezővel számol.
5. Dátum/idő
Minden fedélzeti berendezés számára elérhető kell legyen a pontos dátum (év, hónap, nap) és idő (óra, perc, másodperc), egyrészt a helyi idő szerint, másrészt az ún. UTC (Universal Time Co-ordinated) egyezményes idő szerint.
Az UTC a greenwichi középidő (GMT) utóda, nevében nem nevezve meg egyetlen konkrét földrajzi helyet sem. 1972. január 1-én 0 óra 0 perc 10 másodperckor indult útjára. Ez a jelenlegi, nemzetközi megegyezés alapján használt időrendszer, az ún. koordinált világidő. A pontos időt sugárzó rádió- és televízió adók ezt az időt sugározzák, figyelembe véve a földrajzi elhelyezkedést.Az UTC számításait, az atomidő-skála (TAI – Temps Atomique International) és a 0,00 UTC időpont meghatározását, valamint az időjel szétosztását a Párizsban működő Nemzetközi Súly- és Mértékügyi Hivatal (BIPM – Bureau International des Poids et Mesures) végzi. Az alkalmazott atom-időskála alapja a másodperc, amelyet a céziumatom rezgésével határoznak meg. A világban mintegy 45 laboratórium 250 atomórája szolgáltat mindehhez ellenőrző adatokat. Ez az időskála, az atomalapú másodperc meghatározása révén körülbelül hat nagyságrenddel (!) megbízhatóbb a csillagászati időszabványnál, az UT1-nél, amelyet a Föld forgástengely-ingadozásából számítanak. Az atomidő és a világidő közötti eltérést úgy lehet kiküszöbölni, hogy az időt továbbra is atommásodpercekben mérik, de az idő értékét évente egyszer (ha szükséges kétszer) a világidőhöz igazítják. Így valahányszor a koordinált idő a világidőtől 0,7 másodperccel eltér, az UTC-ben egy 1 másodperces korrekciót hajtanak végre december 31. és január 1. között, illetve ha az eltérés újra fennáll, akkor a korrekciót végrehajtják június 30. és július 1. között is.Az atomidő és a koordinált világidő közötti különbséget táblázatokban adják meg. A részletek közlése nélkül megállapítható, hogy a fenti különbség évente átlagosan 1 másodperccel nő, mivel a Föld tengelykörüli forgása kissé lassul. |
A mozdonyvezető a helyi idő szerint kapja a tájékoztatásokat, míg a UTC szerinti időt a hatósági adatrögzítő használja.
Küldetés kezdete
Az SRS fejlődését nézve jól látható, hogy milyen nehezen is született meg annak idején a vonattal való elindulás, azaz a küldetés kezdete (Start of Mission – SoM) koncepció. A jelenleg érvényes specifikáció által meghatározott szabályok összefoglalása következik.
A mozdonyvezetőnek küldetés kezdete (Start of Mission) eljárást kell kezdeményeznie az alábbi esetekben:
a rendszer élesztése után,
tolatási művelet befejezése után,
küldetés vége után,
szolgagép vezérgéppé válásakor.
A küldetés kezdete eljárás folyamata a fenti esetekben kissé eltérhet egymástól, minthogy a megelőző műveletek függvényében bizonyos adatok már rendelkezésre állhatnak a fedélzeten. Egy a fedélzeten tárolt adat (pl. mozdonyvezető-azonosító, ETCS szint, RBC azonosító és telefonszám, vonatadatok, vonatpozíció) lehet:
érvényes – a tárolt érték helyesnek tudott,
érvénytelen – a tárolt érték hibás lehet, de érvényesíthető,
ismeretlen.
A küldetés kezdetének folyamatábráját mutatja be a lenti ábra, feltételezve, hogy a rendszer közvetlenül az élesztést követően van, az öntesztek lefutása után, SB módban.
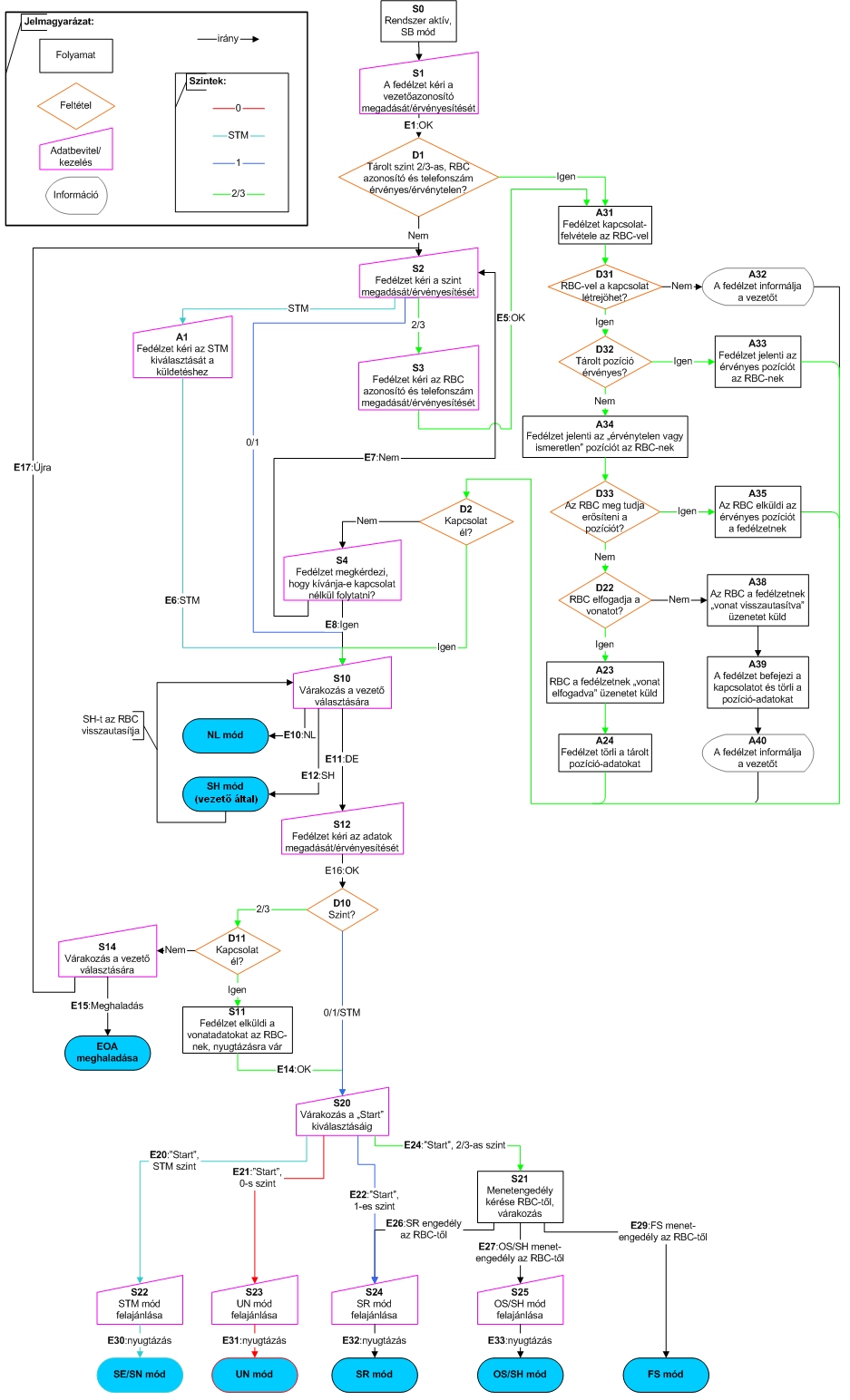
Küldetés kezdetének folyamatábrája
Az S0 pontban a fedélzeti berendezés SB módban van, aktív vezetőállás mellett. A fedélzeti berendezés kéri a mozdonyvezető-azonosító beadását, ha az ismeretlen, vagy érvényesítését, amennyiben érvénytelen (S1). Ennek megtörténte után (E1), ha a tárolt adatok szerint a szint 2/3-as és rendelkezésre áll egy érvényes vagy érvénytelen RBC azonosító és telefonszám, akkor az A31-es pontba jutunk, minden más esetben S2-be. Ha a szintről nincs fedélzeti információ, akkor a DMI bekéri a mozdonyvezetőtől azt, míg ha a szintadat érvénytelen, akkor érvényesíthető vagy újra megadható. Ennek függvényében a három irány valamelyikébe jutunk.
1. Ha a bevitt/érvényesített szintadat 2 vagy 3, akkor a mozdonyvezetőnek meg kell adnia (ismeretlen adat), vagy érvényesítenie kell (érvénytelen adat) az RBC adatokat (S3), ami után a fedélzet felveszi a kapcsolatot az RBC-vel (A31). Ha a kapcsolatfelvétel sikertelen, mert az RBC-t nem sikerült elérni, vagy inkompatibilitás áll fent, akkor erről a mozdonyvezető tájékoztatást kap (A32), és D2-n keresztül közvetlenül az S4 pontba kerülünk.
Sikeres kapcsolatfelvétel esetén a tárolt pozíció érvényességének függvényében haladhatunk tovább. Érvényes adat esetén a fedélzet elküldi azt az RBC-nek az ún. „helyzetjelentés küldetés kezdetén” (SoM Position Report) üzenetben, amivel S10-be jutottunk. A másik két esetben a helyzetjelentésben az „érvénytelen” vagy „ismeretlen” pozíció megjelölés jut az RBC-hez. Ekkor az RBC vagy meg tudja erősíteni az érvénytelen pozíciót (A35, majd S10), vagy dönt arról, hogy úgymond felelősséget vállal-e a vonatért. A vonat elfogadásának feltételeit nemzeti szabályok keretében kell rögzíteni. Ha a vonat visszautasításra került, akkor erről az RBC üzenetet küld (A38), amit megkapva a fedélzeti berendezés a pozícióadatot törli (ismeretlen lesz), befejezi a kapcsolatot az RBC-vel (A39), majd tájékoztatja a mozdonyvezetőt (A40). Amennyiben az RBC érvényes pozíció nélkül is elfogadta a vonatot (A23), akkor jóllehet a pozícióadatok itt is törlésre kerülnek (A24), a kapcsolat fennmarad, és S10-be jutunk.
2. Ha a bevitt/érvényesített szintadat 0 vagy 1, akkor közvetlenül az S10-es döntési pontba érkezünk.
3. Ha a bevitt/érvényesített szintadat STM, akkor a mozdonyvezetőnek ki kell választania az aktuális STM-et, ami ezután ugyancsak a közös S10-es pontba juttat.
A mozdonyvezető az S10 pontban dönthet arról, hogy kíván-e tolatási vagy nem vezérelt üzemmódba kapcsolni, illetve vonatadatokat megadni. Ha a tolatást választja (E12), akkor a c) pontban leírt „mozdonyvezető által kezdeményezett tolatás” eljáráshoz jutunk. A nem vezérelt mód választásakor (E10) a fedélzeti berendezés NL módba vált, s 2/3-as szinten erről jelentést küld az RBC-nek. A vonatadatok megadásának kezdeményezésével (E11) pedig az S12-es pontban folytatódik az eljárás.
Amennyiben valamennyi vonatadatot a mozdonyvezető adja meg, a fedélzeti berendezés kéri azok érvényesítését, vagy újbóli megadását (S12). Ha más forrásokból is származhatnak adatok (vonatinterfész, fedélzeti adattároló), akkor a fedélzeti berendezés felajánlja azokat elfogadásra a mozdonyvezetőnek, megadva természetesen a lehetőséget a változtatásokra. A fentieken túl a kiegészítő STM adatok megadása is szükséges lehet.
Amint valamennyi vonatadat érvényesítésre került (E16), az érvényesített szint függvényében az S20-as (0,1 és STM szinteknél), illetve a D11-es (2/3-as szinteknél) pontba érkezünk. Utóbbi esetben ellenőrzésre kerül, hogy van-e kapcsolat az RBC-vel. Ha a 2/3-as szint ellenére nincs, akkor a vezető választása, hogy hogyan oldja meg a szituációt. Kezdeményezheti a menetengedély végének meghaladását (E15), új szintet adhat meg (E17) vagy izolálhatja a rendszert, stb. Élő kapcsolat esetén az érvényesített vonatadatokat elküldi a rendszer az RBC-nek, és várja annak nyugtázását, amivel ezen az ágon is megérkezünk S20-ba.
Az S20 pontban a mozdonyvezető ténylegesen „Start”-ot kezdeményezhet:
STM szintnél (E20) a vezető nyugtázása után (E30) a kiválasztott STM módban (SE vagy SN) kezdődhet a küldetés.
0-s szint esetén (E21) a vezető nyugtázásával (E31) UN üzemmódba kerül a fedélzeti berendezés.
1-es szintnél (E22) nyugtázást követően (E32) a saját felelősségű (SR) üzemmódba jutunk.
2/3 szinten a vonat menetengedélyt kér az RBC-től. Attól függően, hogy milyen rangú menetengedélyt kapott a vonat, a saját felelősségű, a látra közlekedési vagy tolatási, illetve a teljes felügyeletű üzemmódokba válthat a rendszer.
Közlekedés ETCS-ben
Ahogy a rendszerelemek és szintek tárgyalásánál láthatuk az ETCS alapja a pontszerű vagy folyamatos adatátvitel, a moduláris fedélzeti számítógép-architektúra és az intelligens szenzorok, amelyekkel lehetővé válik a vonatok pontos helyének meghatározása a vonalon. Az ETCS üzem alapköveit a balízok alkotják, bár a kiépítési szinttől függően feladatkörük változó.
A küldetés során a vezetőállásban található kijelző mindenkor informálja a mozdonyvezetőt a megengedett maximális és az aktuális sebességről, a várható jelzésekről, a céltávolságról és a célsebességről. Mindezen információkat kiépítési szinttől függő módon meg kell, hogy kapja a jármű. Ami azonos, az az, hogy szabványosított táviratok formájában érkeznek be az információk bármely ETCS kiépítésű pályától. Az információkat hordozó táviratok leggyakrabban a következő adatokat tartalmazzák (Vincze (1)):
Helyazonosító adatok
A helyazonosító adatok a vonat pontos tartózkodási helyét adják meg. Ezek segítségével történhet a vontatójárművek távolságmérő eszközeinek beállítása.
Pályajellemzők
A pálya jellemzők körébe mindenek előtt a pályára megengedett sebesség, az ív- és lejtviszonyok tartoznak, de ebben a csoportban szerepelnek az állandó sebességkorlátozások is.
Menetengedélyek
A menetengedély (Movement Authority - MA) az ETCS egyik leglényegesebb eleme. Feladata, hogy engedélyezze vagy éppen megtiltsa az előre felosztott szakaszonkénti közlekedést.
A menetengedélyek a vonatok részére megadják, hogy az adott helyen meg kell-e állniuk, illetve tovább szabad-e haladniuk. Utóbbi esetben közlik, hogy milyen sebességgel szabad az adott helyen, illetve környezetben továbbhaladni. Arra is utalnak, hogy a menetengedély meddig érvényes. Ezzel kapcsolatban két fogalmat kell tisztázni. A menetengedély végén (End Of Authority – EOA) az engedélyezett sebesség zérusra csökken, a vonat számára eddig a pontig engedélyezett a mozgás. Egyes szinten ez megfelelhet például egy vörös bejárati jelzőnek. Amennyiben a célsebesség nem nulla, akkor a menetengedély vége helyett a menetengedély határáról (Limit Of Authority – LOA) beszélünk. E célsebesség érvényessége időfüggő lehet. Hazai példával élve a permisszív térközjelzők vörös színképe esetén LOA-ról beszélünk, hiszen az előírt feltételekkel 15 km/h legnagyobb sebességgel meghaladhatók.
Menetengedély határára akkor van szükség, ha a pályaoldal számára nem áll rendelkezésre elég információ ahhoz, hogy a menetengedély végéig hátralévő távolságot pontosan meghatározza. Ekkor a célsebességet nagyobbnak engedélyezi, mint 0 km/h. Az viszont továbbra is a pályaoldal felelőssége, hogy ezt a célsebességet úgy határozza meg, hogy biztosított legyen a vonatnak a célsebességről állóra történő fékezésének lehetősége a rendelkezésre álló biztonsági távolságon belül anélkül, hogy bármilyen veszélyes helyzet kialakulna. A fedélzeti berendezés felelőssége pedig az, hogy haladéktalanul működtesse a fékeket, ha a menetengedély határának meghaladásáig nem érkezett új menetengedély-információ.
A fedélzeti alrendszer a fenti információkat hordozó, meg kapott táviratokat feldolgozza és kiértékeli. A fedélzeti berendezés a vett információkat az ember-gép csatlakozó felületen keresztül a mozdonyvezető részére megjeleníti. A kiértékelés eredményei alapján a fedélzeti berendezés ellátja a vezérlési és ellenőrzési feladatokat is – ha szükséges, akkor a mozdonyvezető által végzett kezeléseket is figyelembe veszi. A végrehajtás eredményéről a vezetőt ugyancsak a DMI-on keresztül informálja. Ha a mozdonyvezetőnek a kapott jelzések értelmében pl. fékeznie kell, akkor arra is felhívást kap, szükség esetén pedig a fékezés kiváltásával maga a fedélzeti alrendszer állítja meg a vonatot (vonatbefolyásolás).
Itt kell megemlíteni a statikus és a dinamikus sebességprofil (DSP – Dynamic Speed Profile) közötti különbséget. A statikus sebességprofil (SSP – Static Speed Profile) összetevői a statikus sebességkorlátozások, ami gyakorlatilag a pályasebesség, a vonat maximális sebessége, a jelző által előírt sebesség és az ETCS üzemmódjától függő sebességkorlátozás. E „készen kapott” adatokból állítja össze a legkorlátozóbb sebességprofilt (az ábrán a szürke vonal) a vonat, majd ezt használja fel azután a dinamikus sebességprofil számításához. A statikus sebességprofil tehát az elméletben megengedett sebességet tartalmazza a pálya adott pontjain.
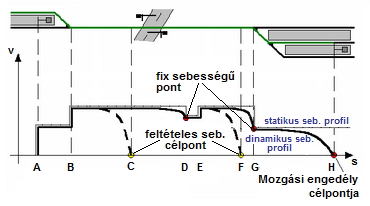
Statikus és dinamikus sebességprofil
Az SSP alapját a pályán elméletileg megengedett sebesség nyújtja, amelyet adott helyeken módosíthatnak például az állandó lassújelek, ahogy az ábra D-E szakaszán is. Itt feltételeztük, hogy a váltókörzetben csökkentett sebesség alkalmazása szükséges (B-ig és G-től). Amint az látható, a statikus sebességkorlátozások nem veszik figyelembe a járművek gyorsulási és lassulási tulajdonságait, a profilban ugrások találhatóak. Megjegyzendő, hogy egy adott vonalszakaszon többféle statikus sebességprofil is lehetséges, például a különleges járművek számára. A statikus sebességprofil a pályától kapott információk függvényében folyamatosan frissül, így adott esetben módosul is.
Ezzel szemben a dinamikus sebességprofil (fekete vonal) a jármű pillanatnyi helyzetéből, a statikus sebességkorlátozásokból és a jármű lassulási paramétereiből határozható meg. A központi egységben végzett dinamikus sebességprofil számítás finomsága erősen függ a járműfedélzetre eljuttatott információk mennyiségétől és minőségétől. Ha több hasznos adatot adnak fel, a menetdiagram kiszámítása közelebb kerül az optimálishoz. Az átvinni szükséges adatmennyiséget – az előírásokon túl – minden vasút maga határozza meg, ezek minden vágányra, illetve vonalszakaszra az elvégzett költséghaszon-elemzéseken alapulnak.
A sebességprofilban történő változások során felhasznált referenciapont általában a vonat vége (pl. ideiglenes sebességkorlátozásnál), azonban előfordulhat olyan eset is, ahol a vonat elejéhez viszonyítanak (pl. hosszú alagutak). A fékezési görbék kiszámításánál figyelembe veszik a menetengedélyeket, a statikus sebességprofilt, a lejtési viszonyokat, a tapadási értékeket, a fékrendszer késleltetését, a vonóerő megszűntetésének időszükségletét és az üzemi- vagy vészfékezéssel elérhető lassulást a sebesség függvényében. A számítás minden esetben a célponttól, menetiránnyal szemben történik.
A dinamikus sebességprofil számítás eredményeképpen minden időpillanatban rendelkezésre állnak a felügyelethez szükséges sebességértékek (pl. vészfék beavatkozási sebesség, figyelmeztetési sebesség, megengedett sebesség, stb.). (Vincze (1))
A példában a C és F pontok feltételes sebességi célpontok. Ha a sorompó nem záródik/zavarba vagy hibába megy, illetve az F ponti bejárati jelző visszaesik, akkor a szaggatottal jelölt sebességgörbék aktivizálódnak – természetesen csak abban az esetben, ha a szakaszon a megfelelő (infill) információ rendelkezésre áll! Az A pont jelen esetben a jármű bejelentkezési pontja, a H pont pedig a menetengedély végét jelöli.
A lehetséges dinamikus sebességgörbék száma gyakorlatilag végtelen, hiszen ha belegondolunk, a jármű a vonal bármely pontján vészfékezési parancsot kaphat (pl. éberségi kezelés elmaradása).
Végül fontos megemlíteni, hogy a tapadási tényező megváltoztatásával, a valós pályaállapotnak megfelelően a vezető biztonságosabban tudja vezetni a vonatot rossz időjárási viszonyok között is, mivel biztos lehet abban, hogy a rendszer az új, biztonságos fékerővel fog számolni. Ennek elősegítésére – a legtöbb adattól eltérően – a tapadási érték menet közben is megváltoztatható.
A statikus és dinamikus sebességprofilról bővebben az EVC általános funkcióinál olvashat.
Küldetés vége
A következőkben áttekintjük, hogy egyes üzemmódokba kerülés mikor jelent(het)i a küldetés végét.
FS, OS, UN, NL vagy SR módból az SB üzemmódba kerülés küldetés végeként értelmezhető. SE/SN STM módoknál a küldetés végének bekövetkezte függ magától az STM-től.
A fedélzeti berendezés távvezérelt (SL) módba lépése minden esetben kiváltja a küldetés vége eljárást. Megjegyzendő, hogy az SL üzemmódba lépés mindig az SB üzemmódon keresztül történik, így ha adott esetben SB módban már bekövetkezett a küldetés vége, akkor innen a távvezérelt módba lépéskor nem hajtódik végre újra a funkció.
FS, OS, SR, PT vagy UN módból a tolatási üzemmódba váltás ugyancsak a küldetés végét jelenti – hiszen ekkor valamennyi vonatadat törlődik (érvénytelen).
Mozdonyvezető által kezdeményezett tolatás
Küldetés kezdetekor a mozdonyvezető a küldetés kezdetének folyamatábra S10-es döntési pontjában az E12-es ágnak megfelelően tolatást kezdeményezhet SB módból. Természetesen a vezető kérelmezheti a tolatás üzemmódot FS, OS, SR és UN módokban is. Az SH módba való sikeres átmenet egyben az előző küldetés végét is jelenti.
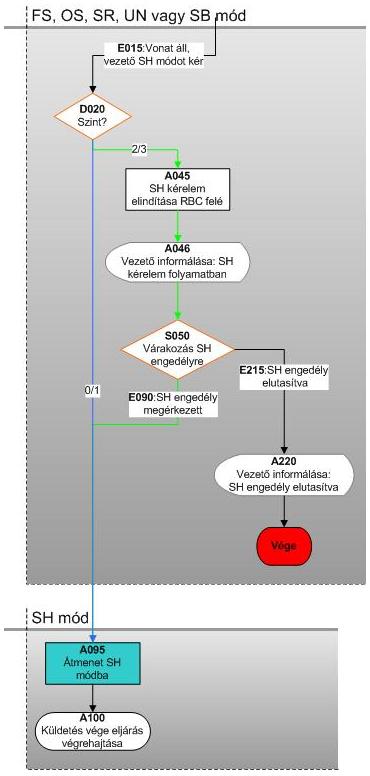
Átváltás tolatás módba, küldetés vége
2/3-as szinten a vonat tolatási kérelemmel fordul az RBC felé (A045), és a függőben lévő folyamatról tájékoztatja a mozdonyvezetőt (A046). Ha a vonat „tolatás visszautasítva” üzenetet kap az RBC-től (E215), ezt megjeleníti a DMI-on is (A220). Ellenkező esetben az átváltás SH módba végbemehet (A095).
0/1-es szinten az átváltás az alapfeltételek megléte esetén azonnal végbemegy (A095).Az SH módba történő átmenet minden szintnél a küldetés vége eljárást vonja maga után, és 2/3-as szinten a sikeres üzemmódváltásról a fedélzet jelentést küld az RBC-nek.
Lap teteje
ETCS
Az ETCS
Az ETCS története
ETCS specifikációk
Rendszerelemek
Pályamenti rendszerelemek
- Balíz
- LEU egység
- Hurok
- Rádióhálózat
- RBC központ
- RIU egység
Fedélzeti rendszerelemek
- EVC
- BTM/LTM modul
- DMI
- JRU adatrögzítő
- Odométer
- STM modul
- Rádió
- TIU egység
- Vonatintegritás
ETCS szintek
1-es szint
2-es szint
3-as szint
STM szint
0-s szint
ETCS üzemmódok
Küldetés ETCS-ben
Az ETCS nyelv
Változók
Csomagok
Táviratok
Üzenetek
ETCS könyv
Az ETCS jelene
Az ETCS jövője
Vissza a főoldalra