
A fedélzeti vonatintegritás-ellenőrző modulról általánosságban
A vonatintegritás modul működése
A fedélzeti vonatintegritás-felügyelet megvalósítási lehetőségei
A fedélzeti vonatintegritás-ellenőrző modulról általánosságban
A vonatintegritás felügyeletének fedélzetre telepítése a kulcs ahhoz, hogy egy vasútvonalon ETCS 3-as szintű közlekedést valósítsunk meg. A vonategység ellenőrzésének két módja lehetséges:
A mozdonyvezető általi felügyelet
ez főként kis forgalmú vasútvonalakon valósítható meg, illetve visszaesési szintként alkalmazható.
A felügyeletet egy ERTMS/ETCS alrendszer végzi
a Vonategység Felügyeleti Rendszer (TIMS – Train Integrity Monitoring System) alkalmazásának egyértelmű előnye, hogy használatával lehetővé válik a nagysebességű vonalak ETCS 3-as szintű kiszolgálása, és ezáltal a mozgó blokkos közlekedés bevezetése.
3-as szinten a TIMS vonatintegritás modul feladata a vonat egységének, épségének ellenőrzése, annak figyelemmel kísérése, hogy a vonat nem szakadt-e szét. Az alrendszer opcionálisan információval szolgálhat a vonathosszról is. Az információkat a TIU-n keresztül juttatja az EVC-hez a berendezés. Az állomási tartózkodás és a tolatási műveletek kiszolgálása nem tartozik a TIMS modul feladatai közé.
A vonatintegritás funkciót egy az ETCS-en kívüli berendezés kell megvalósítsa. Napjainkig a 3-as szint jórészt megmaradt a tesztelési szakaszban, üzleti projekt nem indult. Mindez kihatással van a szinthez kapcsolódó rendszermodulok kiforrottságára is. A vonatintegritás-ellenőrző funkció gyakorlati megvalósítására számtalan ötlet ígérkezik, ám mindnek megvannak a konkrét alkalmazhatóságot érintő előnyei és hátrányai. A fizikai összeköttetést igénylő megoldásokat nehéz széles körben, valamennyi járműtípuson (személy és teher) általánosan elterjeszteni. A rádiós átvitelek pontatlansága (hosszú tehervonatok ívben „rövidülése”), az alkalmazott frekvenciasáv interoperabilitásának biztosítása, a műholdas rendszerek (pl. GPS/INS technikák) újdonsága pedig a vezeték nélküli kialakítások elterjedését hátráltatja.
A vonatintegritás modul működése
A vonategység ellenőrző modul bekapcsoláskor a többi egységhez hasonlóan öntesztet végez, amit meghatározott időközönként ismétel, de a mozdonyvezetőnek is van lehetősége tesztet kérnie. Ha a modul helyes működéséhez adatokra van szükség, akkor azt a DMI-on keresztül, a normál adatbeviteli eljárás keretében kell rögzíteni.
A működés kapcsán a TIMS a következő információkat küldheti el az EVC felé:
Nincs információ
Vonategység ép (időadattal)
Vonategység megsérült
Hibaállapot
A vonategység ép információ minden esetben időadattal kerül elküldésre. Az időadat azt mutatja, hogy a vonategység ép információ pontosan hány másodperccel ezelőttre vonatkoztatható. Ez nagyforgalmú személyközlekedés esetén 4 másodperc alatt kell legyen, de mellékvonali teherforgalom esetén is jellemzően 30 másodpercen belüli frissességgel kell számolni. Ez az ún. közlési idő függ a vonategység állapot észlelésének idejétől, e státuszinformáció EVC-hez jutásának idejétől és a ciklusidőtől, amilyen időközönként maga a vonategység információ közlésre kerül. Az időadatnak főként a vonat minimum biztonsági vég információjának, azaz a biztonsági vonathossz számításakor van jelentősége.
A vonategység információ EVC felé való megküldése lehet folyamatos, meghatározott ciklikussággal, ám kisforgalmú vonalak esetén a specifikáció megengedi az EVC általi eseményvezérelt lekérdezést is.
A mozdonyvezetőnek a DMI-on keresztül lehetősége kell legyen a vonategység információ megerősítésére, amire elsősorban indulási alapállapot érvényesítésekor, illetve a modul meghibásodásakor van szükség. A megerősítést az adatrögzítő minden esetben tárolja. Természetszerűleg ugyancsak rögzítésre kerül valamennyi a vonategység információban bekövetkező változás is.
A fedélzeti vonatintegritás-felügyelet megvalósítási lehetőségei
A specifikáció kimondja, hogy a rendszer működését a terepviszonyok és az épületek nem befolyásolhatják. Egy ideális modulnak ráadásul egyszerre ki kell tudnia szolgálni mind a személy-, mind a tehervonatokat. A konkrét megvalósítás lehetőségei a következők:
Elektronikus összeköttetés nélküli vonatoknál
1. Az első (és az utolsó) kocsi főfékvezetékében lévő levegő nyomásának ellenőrzésével;
2. Az utolsó kocsi ultrahangos jeladójától a főfékvezetéken az első kocsi ultrahang vevőjéhez küldött jel átvitelével;
3. Az első kocsiban ultrahangos jeladó és vevő elhelyezésével, a vonat végéről való visszaverődés mérésével;
4. Az utolsó kocsiban a főfékvezeték levegőnyomásának mérésével és az információ rádiós jeladó* segítségével az első kocsiban elhelyezett vevőhöz juttatásával (*a rádiós átviteleknél – az interoperabilitási törekvések folytán – az alkalmazott rádiófrekvencia Európa valamennyi országában elérhető kell legyen);
5. A nyomás és a mozgás érzékelésével, az információ rádión keresztüli első kocsihoz juttatásával (lásd ábrát lent);
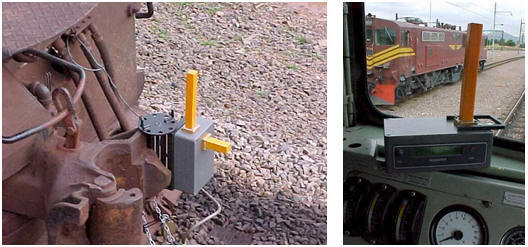
Hordozható rádiós vonatvég/vonategység ellenőrző eszköz
6. A vonat hosszának felügyeletével, rádiójelnek a vonat eleje és vége közötti átviteli időszükségletének mérésével;
7. A vonat hosszának felügyeletével, a vonat elejének és végének műholdas helyzet-meghatározásával (pl. GPS)
8. Kombinált navigációs rendszer, GPS és INS (Inertial Navigation System – Inerciális Navigációs Rendszer) alkalmazásával.
Elektronikus összeköttetéssel igen, de rendszerbusszal nem rendelkező vonatoknál
1. A vonat valamennyi járművén végighaladó hurokban a feszültség és/vagy áram mérésével;
2. A vonat valamennyi járművén végighaladó hurokkal, aktív kommunikációs egységgel a vonatvégen;
3. UIC 541-5 (ElektroPneumatikus fék alkalmazás) szerinti UIC EP kábel alkalmazásával;
4. Vonatvég ellenőrző készülék meglétének felügyeletével.
Rendszerbusszal rendelkező vonatoknál:
1. UIC 556, IEC 1375 alapú rendszerbusszal;
2. Optikai kábellel, biztonsági hurok és egyedi számítógép valamennyi motorvonati egységben (német ICE példa).
Megfelelő műszaki személyzettel egy vonatvég jelző egység kialakítástól függetlenül egy percen belül felhelyezhető kell legyen. A vonatvég jelző egység kapcsán fontos biztosítani, hogy az csak az utolsó járműegységre helyezve adhasson vonatvég-információt. Megfelelő kialakítással elérhető, hogy az eszköz felismerje, ha nem az utolsó egységen került aktiválásra. Hasonlóan kielégítő megoldás, ha a vonatvég jelző eszköz felhelyezése után további járműegységek fizikailag nem kapcsolhatók a szerelvényhez (pl. a hurok – automatikus – csatolásának blokkolása).
A specifikáció rendelkezik még az akkumulátoros működés alapfeltételeiről is. Ha a vonatvég jelző akkumulátorról működik, akkor annak legalább 200h-s üzemkészséget kell tudnia produkálni teljes feltöltöttség esetén. A lemerülésről, töltési igényről a mozdonyvezetőt 12 órával a várható leállás előtt tájékoztatni kell, majd a felhívást minden órában ismételni szükséges, jelezve a várhatóan rendelkezésre álló üzemidőt. Ha a töltöttség kritikus szintet ér el, azaz az egység lemerülőben van, akkor a vonatintegritás modul hibaüzenetet küld az EVC‑nek, majd lekapcsol.
Lap teteje
ETCS
Az ETCS
Az ETCS története
ETCS specifikációk
Rendszerelemek
Pályamenti rendszerelemek
- Balíz
- LEU egység
- Hurok
- Rádióhálózat
- RBC központ
- RIU egység
Fedélzeti rendszerelemek
- EVC
- BTM/LTM modul
- DMI
- JRU adatrögzítő
- Odométer
- STM modul
- Rádió
- TIU egység
- Vonatintegritás
ETCS szintek
1-es szint
2-es szint
3-as szint
STM szint
0-s szint
ETCS üzemmódok
Küldetés ETCS-ben
Az ETCS nyelv
Változók
Csomagok
Táviratok
Üzenetek
ETCS könyv
Az ETCS jelene
Az ETCS jövője
Vissza a főoldalra